控制系统的状态空间表达式:描述系统输入、输出和状态变量之间关系的方程组称状态空间表达式
状态方程:描述状态变量与输入之间的关系(动态/微分方程)
输出方程:描述输出与状态变量之间的关系(静态/代数方程)
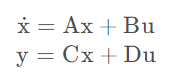
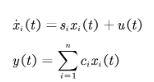
状态空间输入和输出方程一般形如:
动态系统的两类数学描述:
外部描述:(输入——输出描述)
内部描述:状态空间描述
微分方程和差分方程:
差分方程:由未知输出序列项与输入序列项构成的方程。
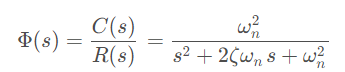
二阶系统模型:R-L-C震荡电路
二阶表达式
状态空间描述基本概念:
输入:外部对系统的作用(激励),输入包括控制输入和干扰输入。
输出:系统的被控量或从外部测量到的系统信息。
若输出是由传感器测量得到的,又称为观测。
状态变量:一个动力学系统的状态变量组定义为:能完全表征其时间域行为 的一个最小内部变量组。
状态变量组最小性的物理特征。独立储能元件?。
状态矢量:一个动力学系统的状态定义为由其状态变量组所组成的一个列向量。
系统矩阵 输入矩阵 输出矩阵 前馈矩阵
画方框图:?
系统框图写系统状态空间表达式?
RC滤波环节?
小结:系统是几维系统,则对应几个状态方程,即对应几个积分器,积分器的输出就是状态变量。
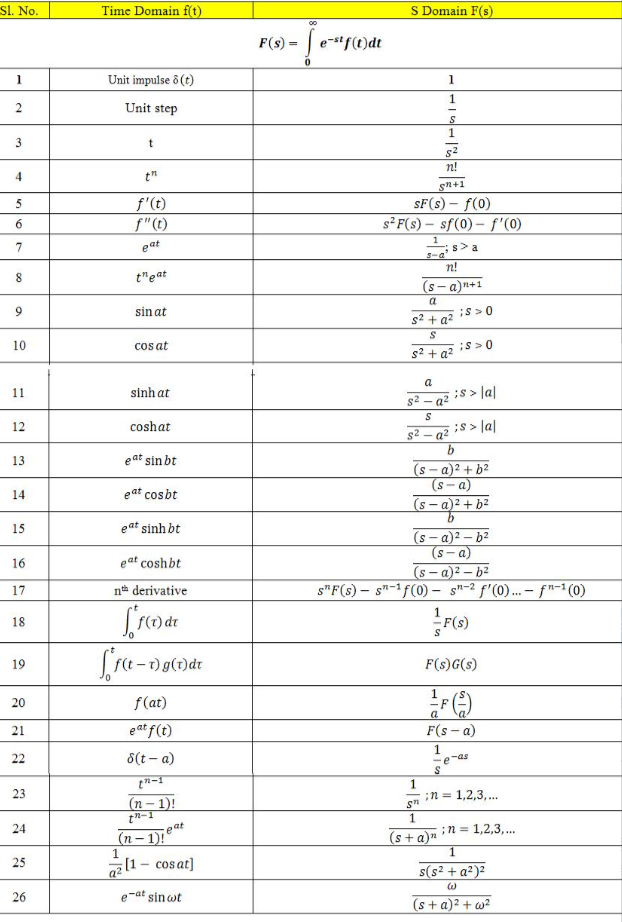
拉普拉斯变换

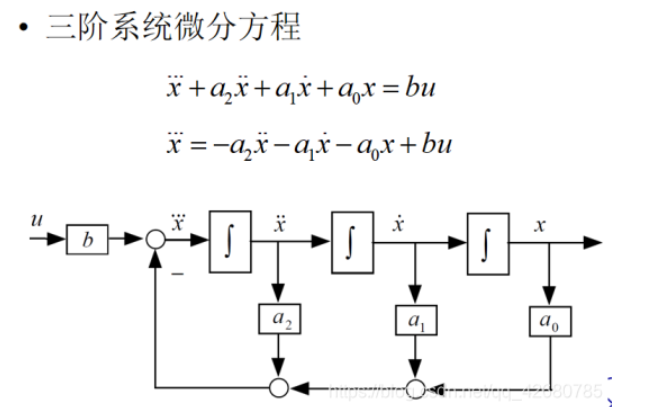
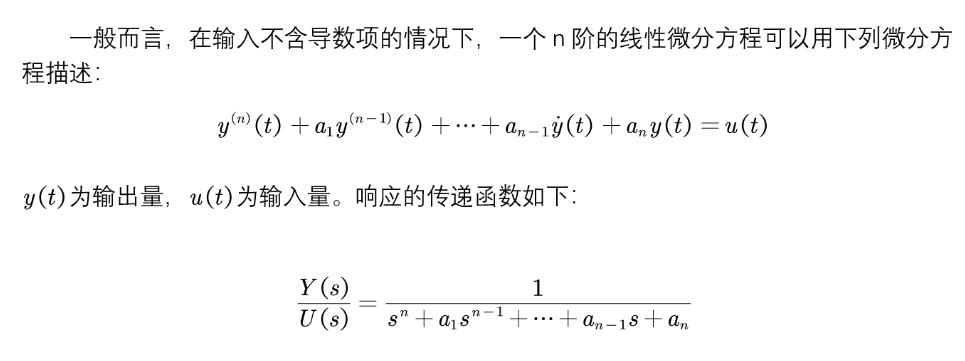
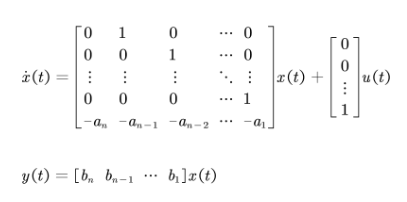
输入不含导数项:
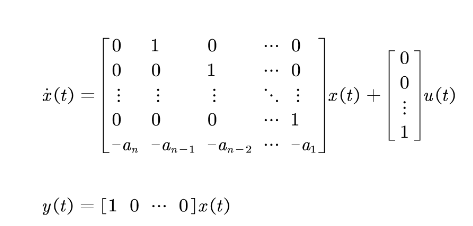
能控规范型(能控标准型)
求解系统状态空间表达式的关键就在于状态变量的选取(这也是为什么系统有多种表现形式的原因),对于如上输入不含导数项的情况,状态变量往往选为输出变量的0~n-1阶导数,就可以获得n个一阶微分方程,从而将高阶系统转化为一阶微分方程组,最终使控制系统得到简化。
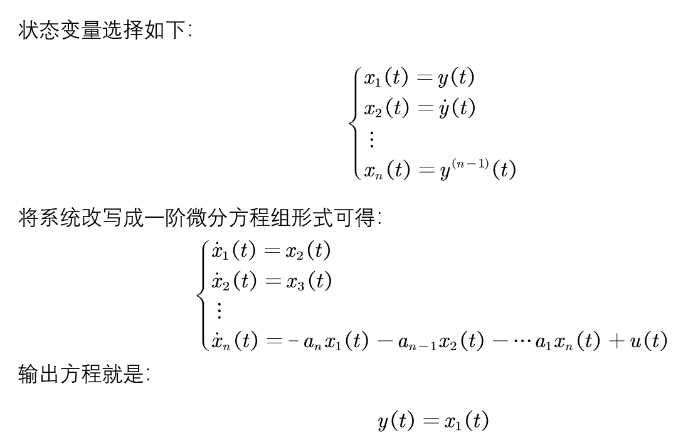
用向量-矩阵的形式表示时,状态空间方程如下:
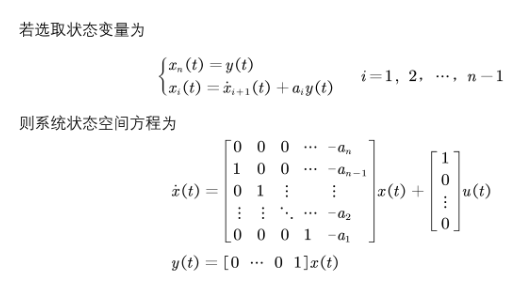
能观规范型
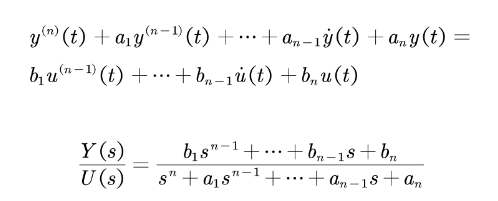
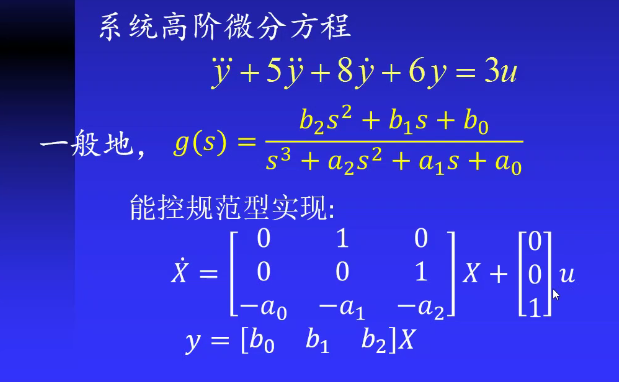
输入含有导数项
输入含有导数项的微分方程在不仅求解上复杂,而且在物理实现上也存在麻烦,故希望选取合适的状态变量使得状态方程中不含输入函数的导数项。输入含有导数项的微分方程与传递函数如下:
注意n的顺序,这里的n的大小是从高次项往低次项递增的
能控规范型
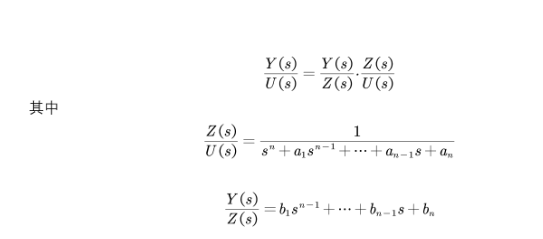
将传递函数改写为:
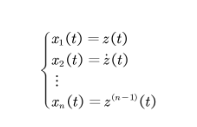
选择状态变量为中间变量z的0到n-1阶导数:
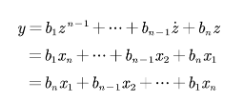
结果得到与输入没有导数项的状态方程类似,不同的是输出方程:
最终的到输入含有导数项的能控规范形状态空间表达式为:
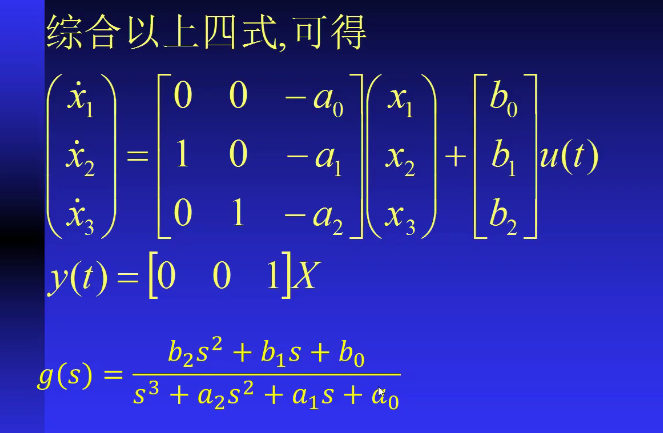
能观规范型
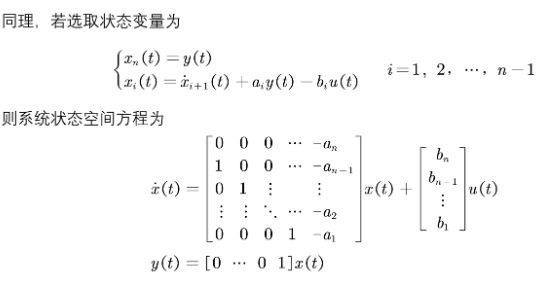
这便是输入含有导数项的能观测规范形状态空间表达式。
小结:可以由传递函数直接写出其规范型,如果记住公式的话。
约旦规范型
除了能控规范形和能观测规范形,也可以把系统矩阵写成约旦形,有时候会特别有用。约旦规范形又可以分为两种情况。
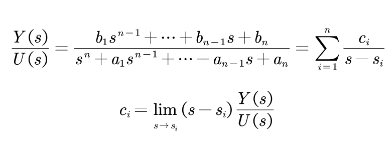
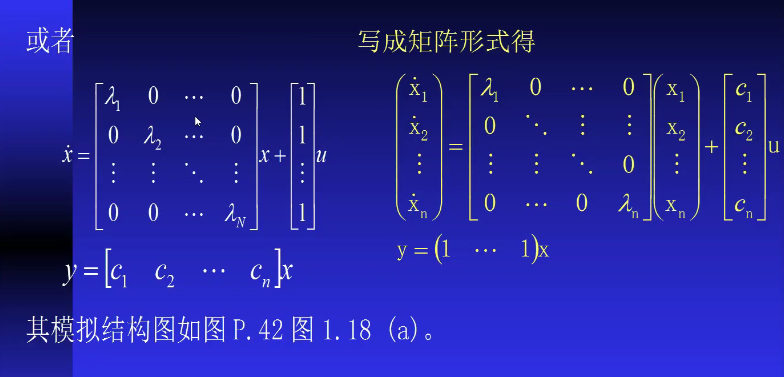
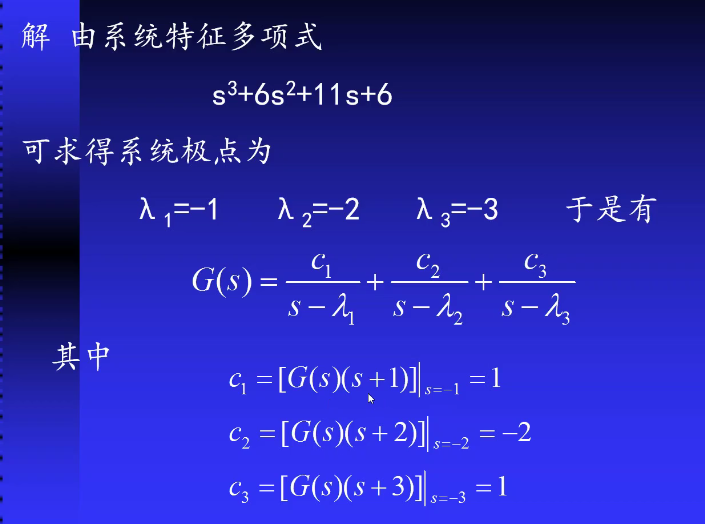
传递函数所有极点互异。将传递函数分解为部分分式的形式:
选取状态变量:
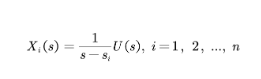
则有:
改写成矩阵形式,即可得到极点互异的约当规范形状态空间表达式:
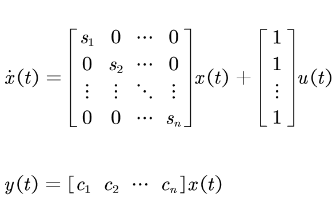
观察表达式可以知道,系统矩阵的中的主对角元素正好是该系统的极点,而且只有主对角元素才有可能是非零的,系统矩阵则变为一个对角阵。对角阵是一种特殊的约旦阵。
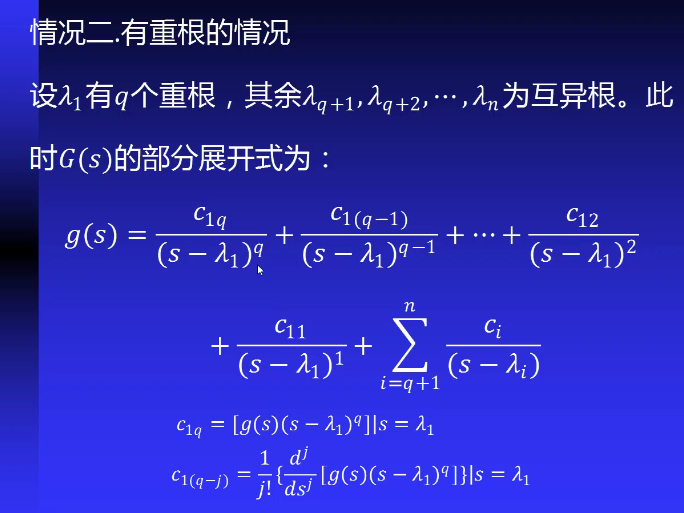
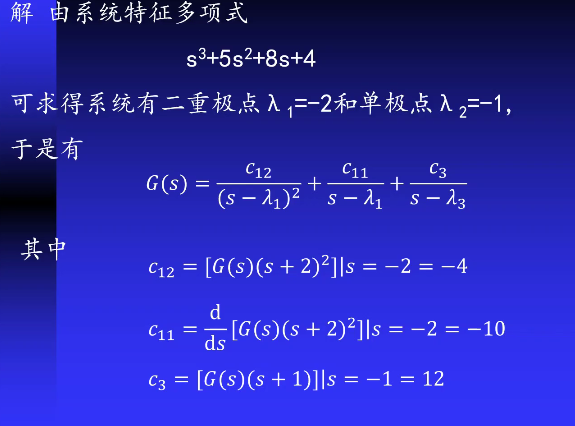
传递函数所有极点非互异(有重根)
首先依然是将传递函分解为部分分式形式,然后再用留数法确定其系数:
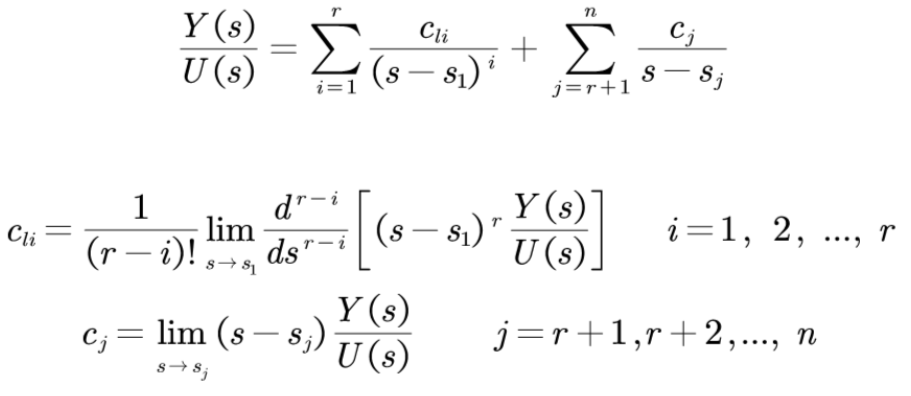
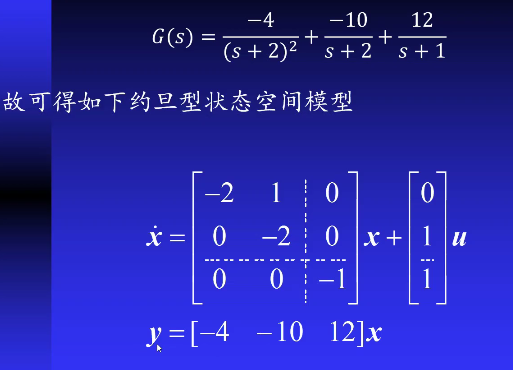
接着选择状态变量(重极点与互异极点分开选):
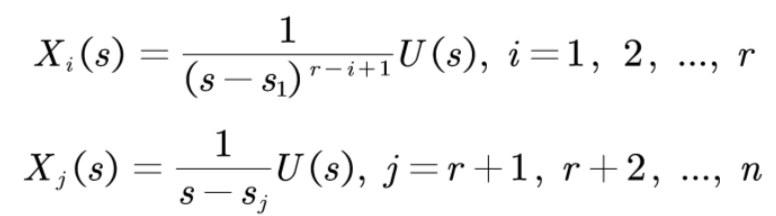

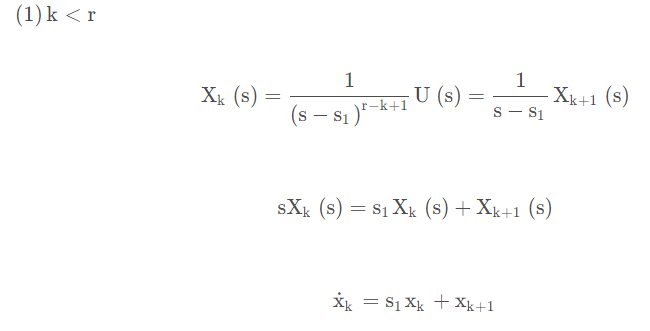
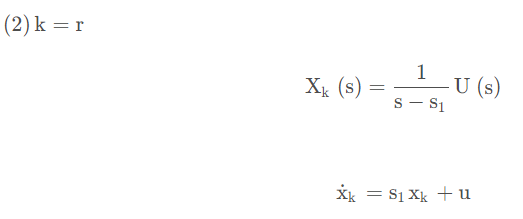
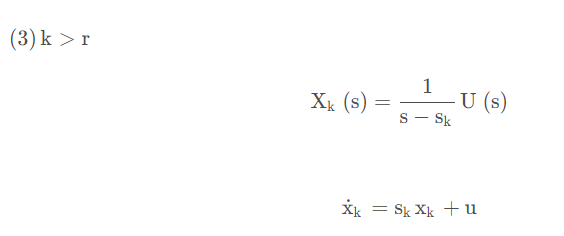
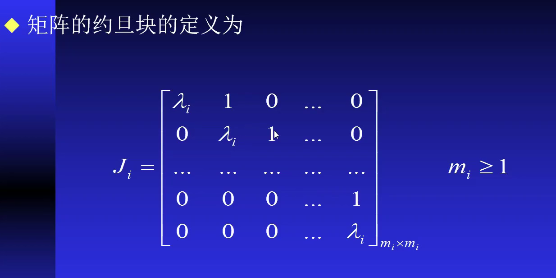
以上三种情况的约旦规范形状态空间表达式可以归纳为:
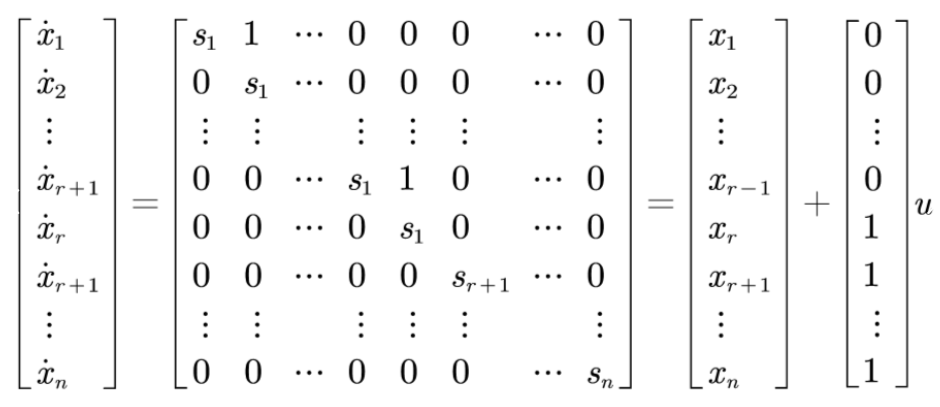

观察约旦规范形的各个系数矩阵可知:系统矩阵的主对角线由一些约旦块组成,并且其余元素都为0。当所有约旦块均为1阶时,系统矩阵为对角矩阵,也就是系统无重极点,并且主对角线的值也是系统矩阵的特征值。
上课时候一些课件图片
对角规范型(顾名思义)
以上两式互为对偶,系统模拟结构图也互为对偶
及约旦规范型实现
矩阵有相同特征值时,可转换为约旦标准型。假设矩阵A有4个特征值,其中2个相同,可转换为如下的约旦标准型(约旦块可以为一阶),主对角线上面对应为1
电容电感电流电压计算公式

阻尼器计算公式:F=c*v,F为阻尼器输出阻尼力(kN),C为阻尼系数(kN/(m/s)α),V为阻尼器活塞与缸筒的相对运动速度(m/s),α为阻尼指数。阻尼指数α,也叫速度指数
状态变量的线性变换
行列式
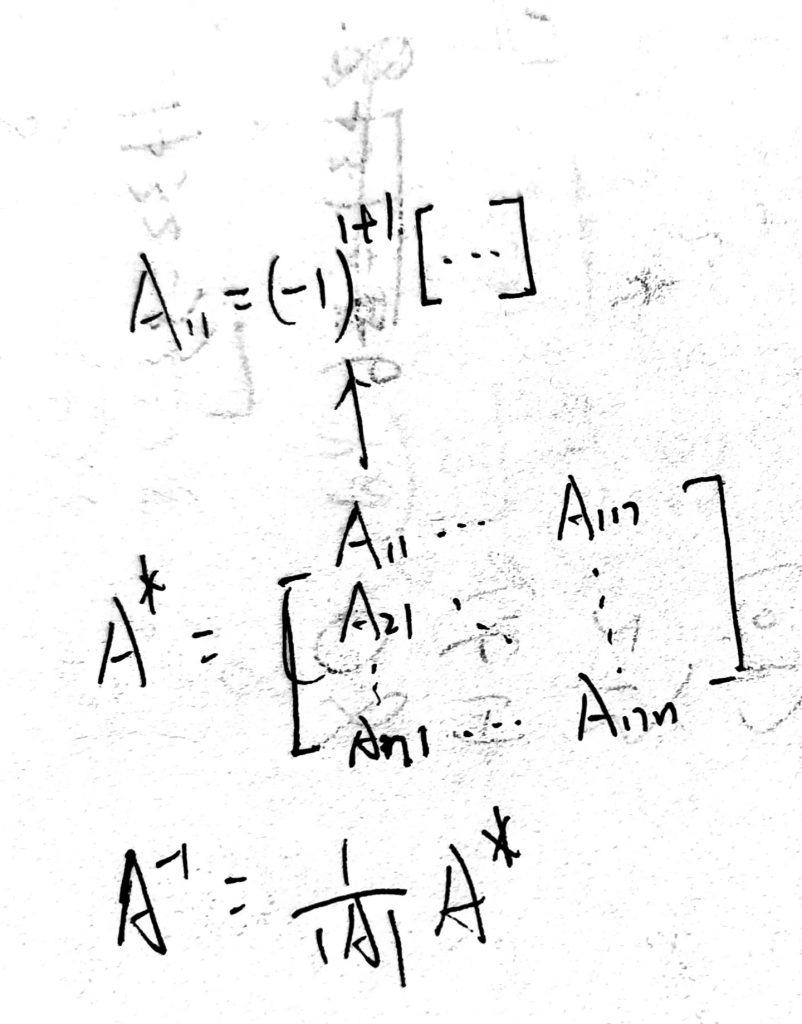
代数余子式
余子式
逆矩计算方法
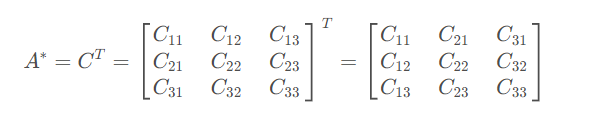
伴随矩阵法:伴随矩阵/行列式
初等变换法(初等行变换和初等列变换)
但是是有条件的.如果是对[A E]进行操作就必须是行变换,如果对上边A下边E的形式就必须用列变换.对同一形式不能一会行变换,一会列变换.
状态空间表达式的非唯一性
矩阵的秩:若为满秩,则行列式不为0,且可逆
系统特征值不变性及其系统的不变量
系统状态空间表达式中的系统矩阵A的特征值称为系统的特征值
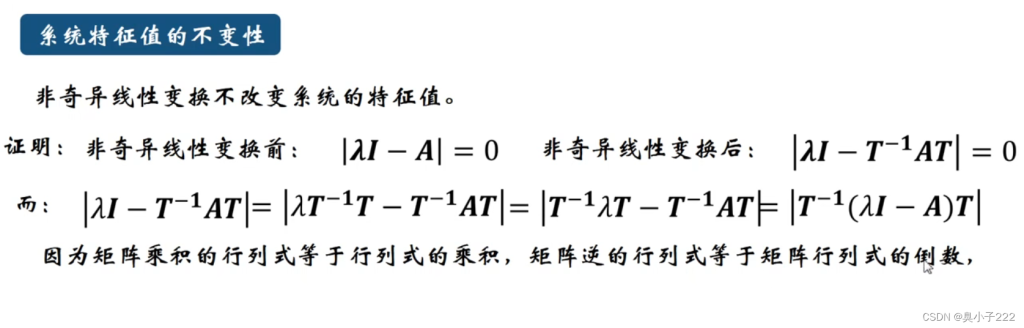
小结:非奇异线性变换不改变系统的特征值,不改变传递函数矩阵
特征矢量?
状态空间表达式化对角标准型
状态空间表达式化约旦标准型
- 计算特征值
- 求特征向量的逆矩阵
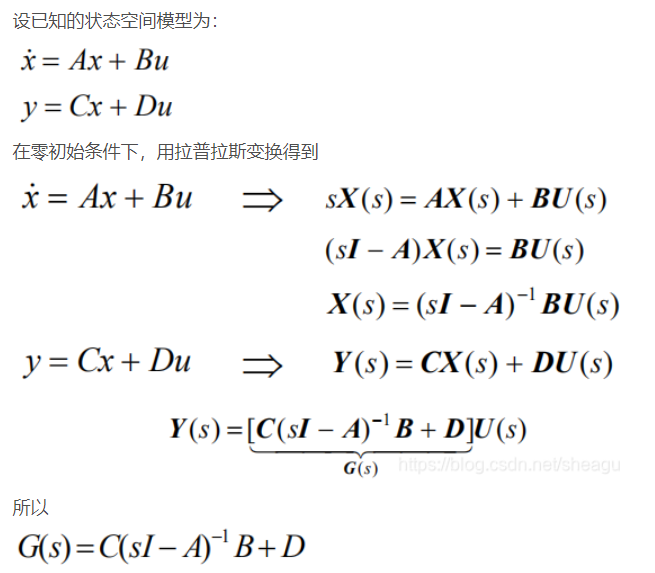
从状态空间表达式求传递函数阵或传递函数
- mimo(多)
- siso(单)
传递函数阵:多个输入和输出构成的矩阵
- 计算逆矩阵(只能用伴随矩阵法,有多项式在里面的话)
离散时间系统的状态空间表达式
离散系统的状态空间表达式可以用差分方程表示
离散系统模拟结构图
离散函数传递函数阵
时变系统和非线性系统的状态空间表达式
线性时变系统
状态空间表达式为
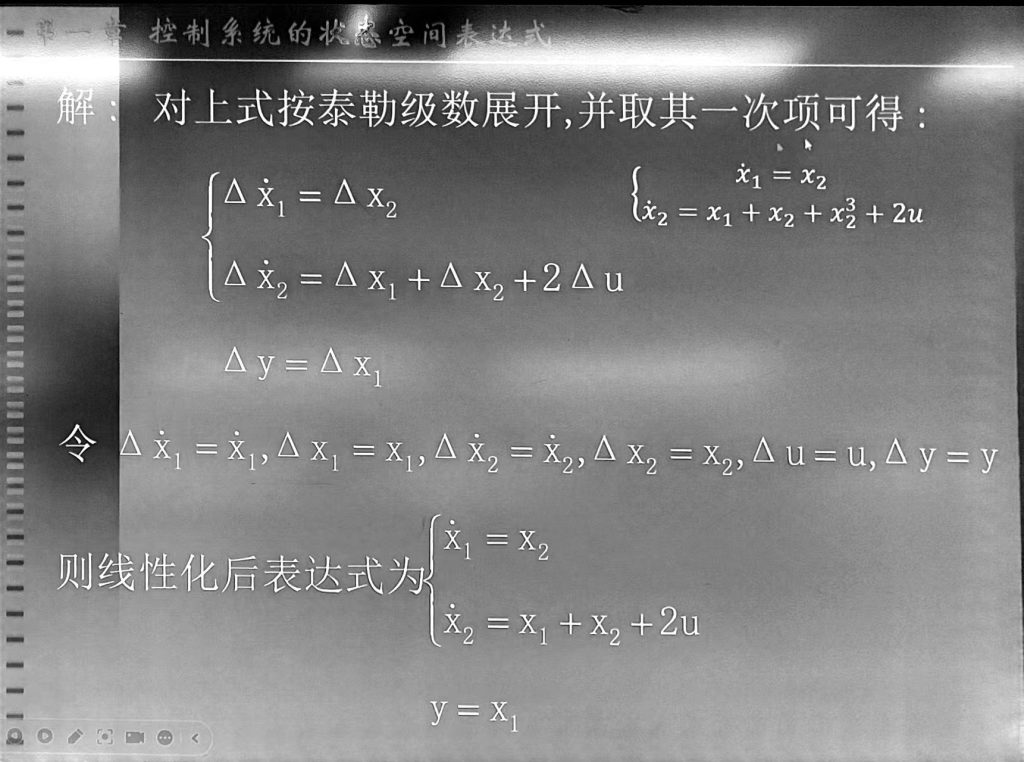
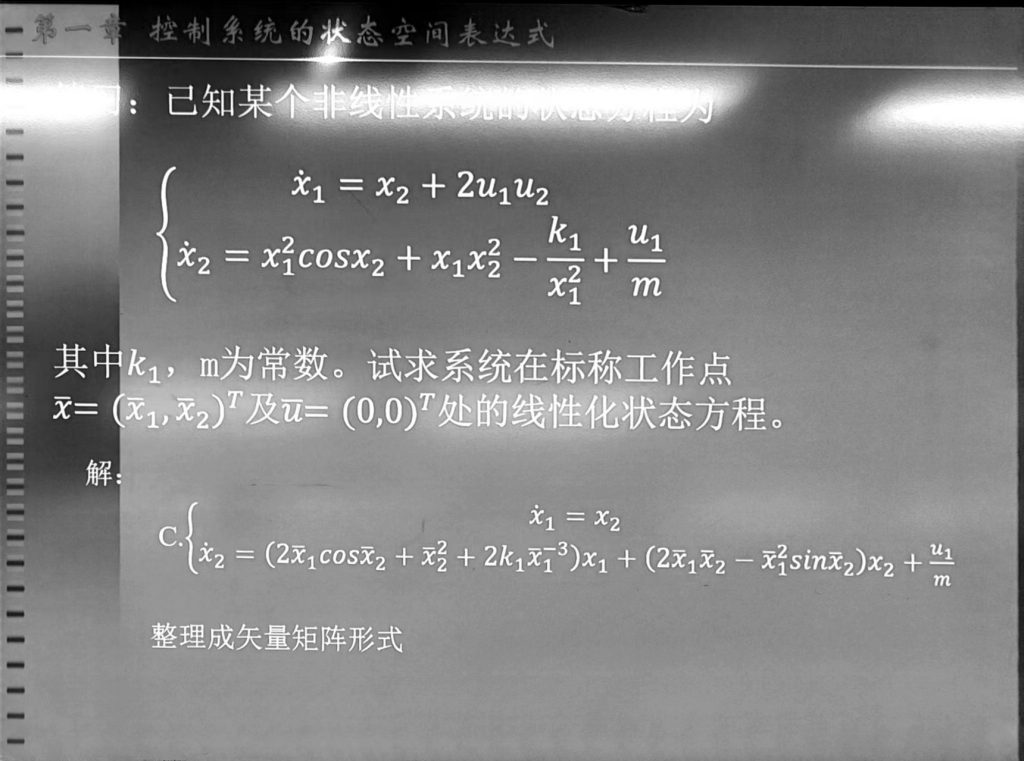
非线性系统
泰勒展开(建立状态空间表达式的过程)
第二章 控制系统状态空间表达式的解
系统的自由解 p58
矩阵指数函数

证明
状态转移矩阵的基本性质(四个矩阵)
根据状态转移矩阵(∅(t))求系统矩阵
求矩阵指数函数

∅(t)也是如上计算,两者相等
p63例题3
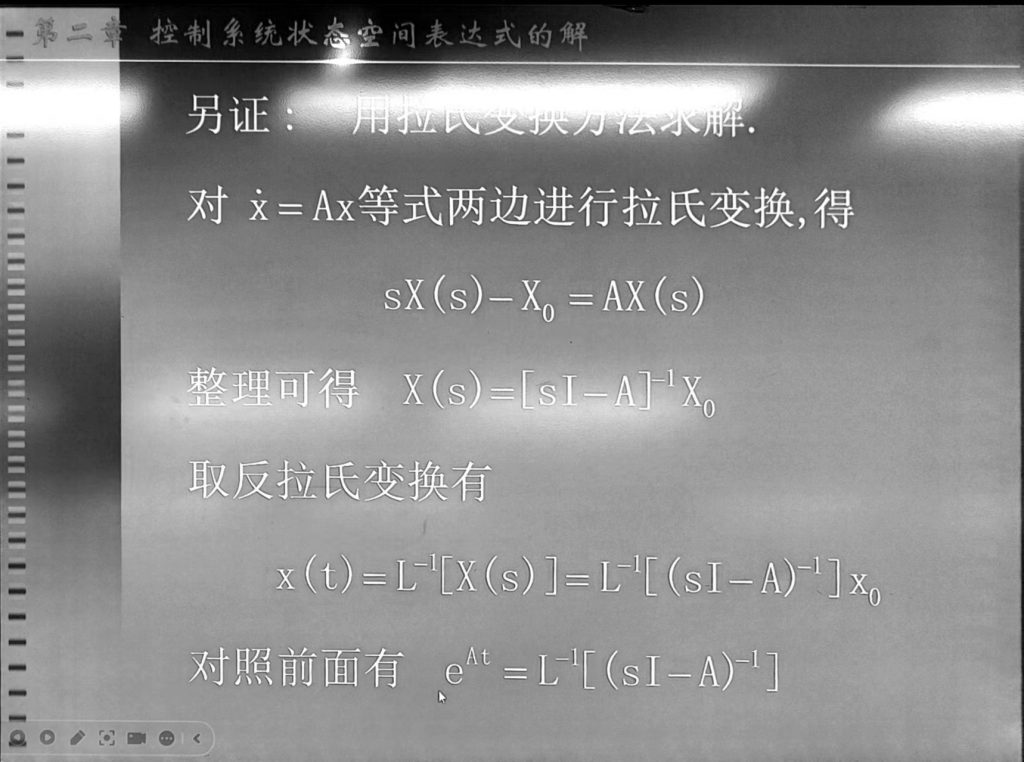
拉氏变换
凯莱哈密顿定理
互异和不互异
p66 2.6 2.7p
线性系统的非齐次方程的求解
p69 拉普拉斯变换证明
p69 2.27 公式
*线性时变和离散
如何计算矩阵指数函数?
定义法:
对于给定的N*N矩阵,计算公式为

此方法能够得到矩阵指数函数的数值解,且在编程计算和获得数值解方面有着很大的优势。但不能得到矩阵指数函数的解析形式。
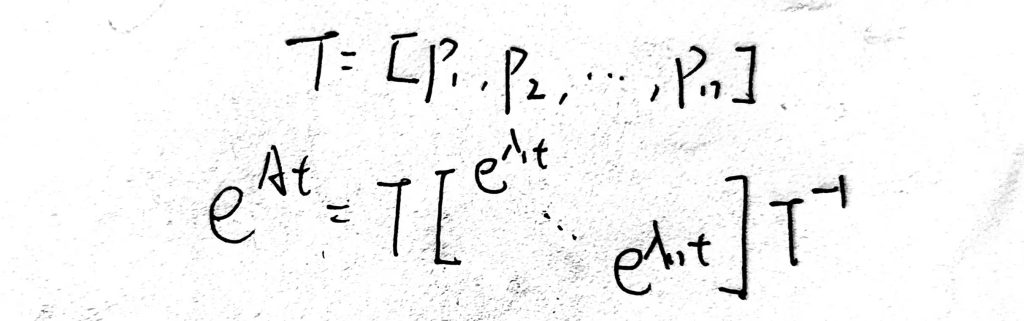
特征值法:
通过特征值法计算矩阵指数函数的方式,首先要确定矩阵A的特征值λ为两两互异的,同时根据特征值导出矩阵A的右特征向量vi,求出变换矩阵P(一般来讲这里是T)
这里介绍一下求逆矩阵的方法
增广矩阵+单位矩阵变换法(需要初等行变换)
伴随矩阵法(二阶特殊(只需要主对角线交换,副对角线取相反数))
这里代数余子式用到了
拉氏变换
直接记公式求解就行
凯莱公式
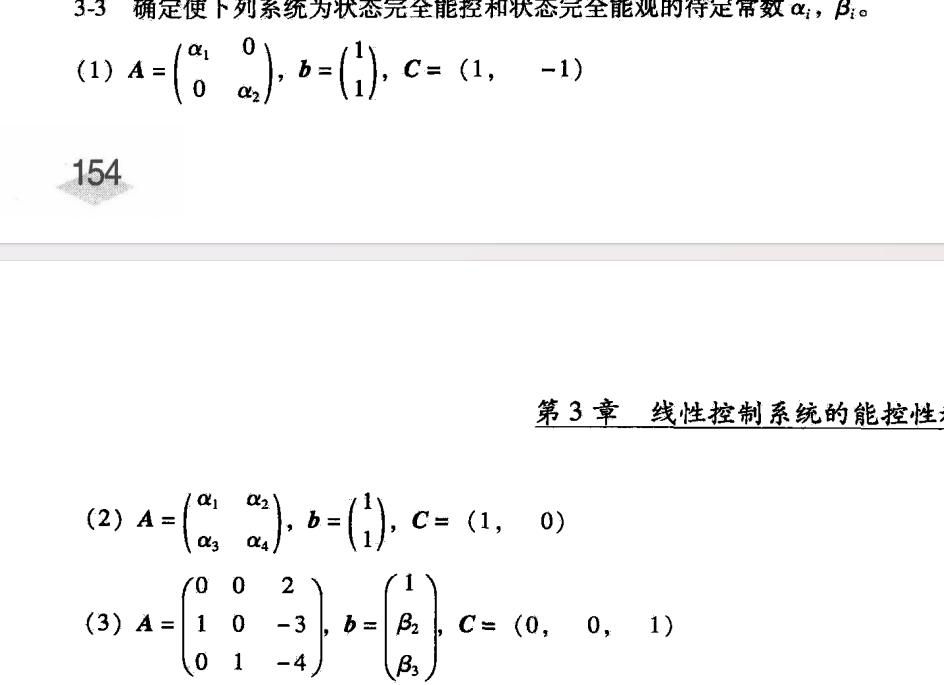
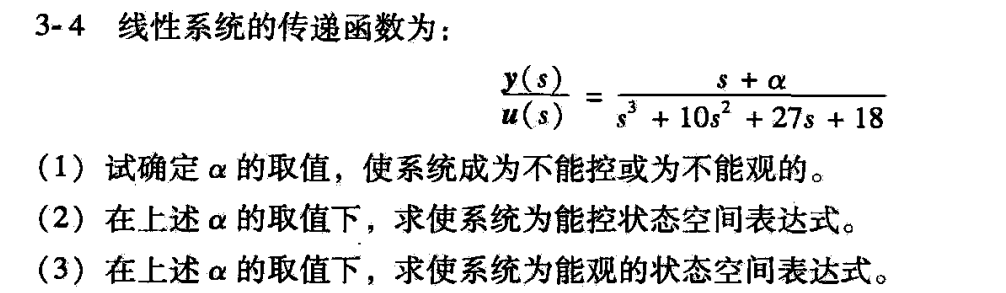
第三章 线性控制系统的能控性和能观性
线性连续定常系统的能控性,与状态方程有关,与输出方程无关。
对角型及其约旦标准型判据()
定理:非奇异变换 不改变线性定常系统的能控性和能观性

能观性
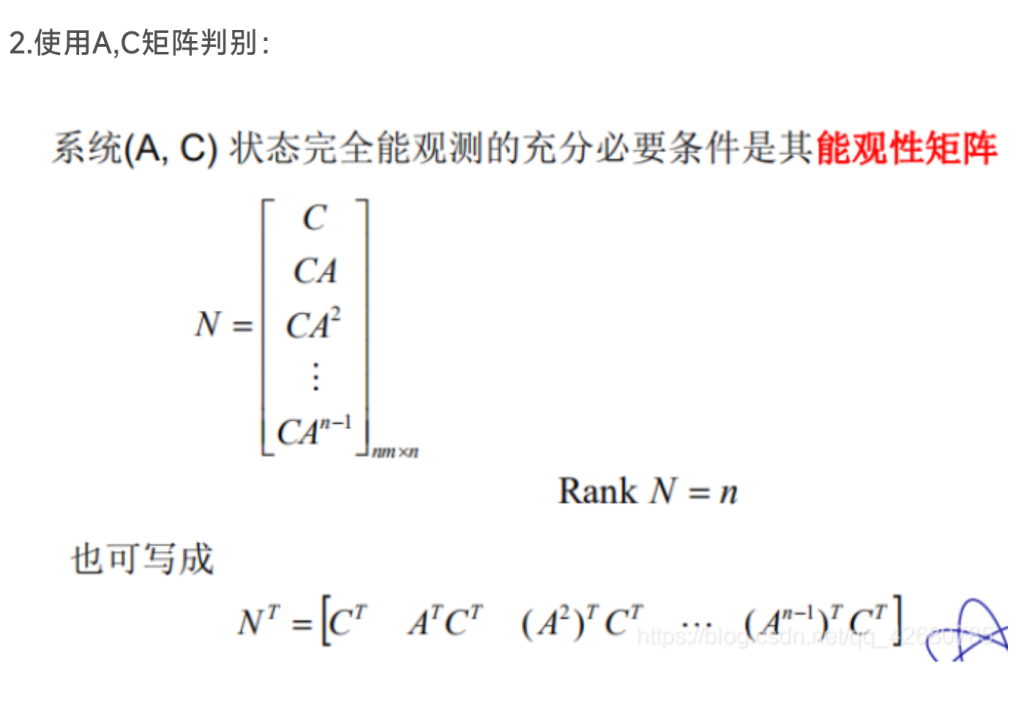
如果满秩,可观
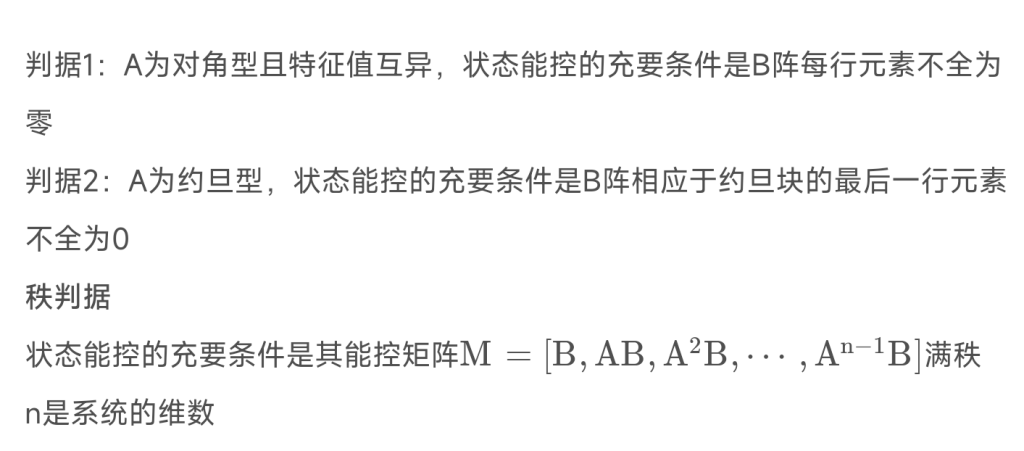
能控判断
判据1:A为对角型且特征值互异,状态能控的充要条件是B阵每行元素不全为零
判据2:A为约旦型,状态能控的充要条件是B阵相应于约旦块的最后一行元素不全为0
能观判断
判据1:A为对角型且特征值互异,状态能观的充要条件是C阵每列元素不全为零
判据2:A为约旦型,状态能观的充要条件是c阵相应于约旦块的第一列元素不全为0
基于对角判断系统能观能控
b矩阵横着观察 全部都非0能控
c阵竖着观察 全部非零能观
基于约旦型判断系统能控能观
分约旦块后,看最后一行,每个约旦块最后一行不能为0但必须线性不相关,才能可控(特征值相同的情况下,这里是看每一行是否特征值相同)
看第一列,每个约旦块第一列不能为0但必须线性不相关,才能可观
小结:具有相同特征值的单输入一—单输出系统,
必然是状态既不能控又不能观。
互为对偶系统的传递函数阵是互为转置的且其特征方程相同。
互为对偶系统 一个能观对应另一个能控
一个能控对应另一个能观
两者有什么关系?能控二型和能观一型对偶,能控1型和能观2型对偶
能控规范一型和二型
能观规范一型和二型
只有状态完全能观才能变换成能观规范型
例题3.12 3.13 3.14 p126
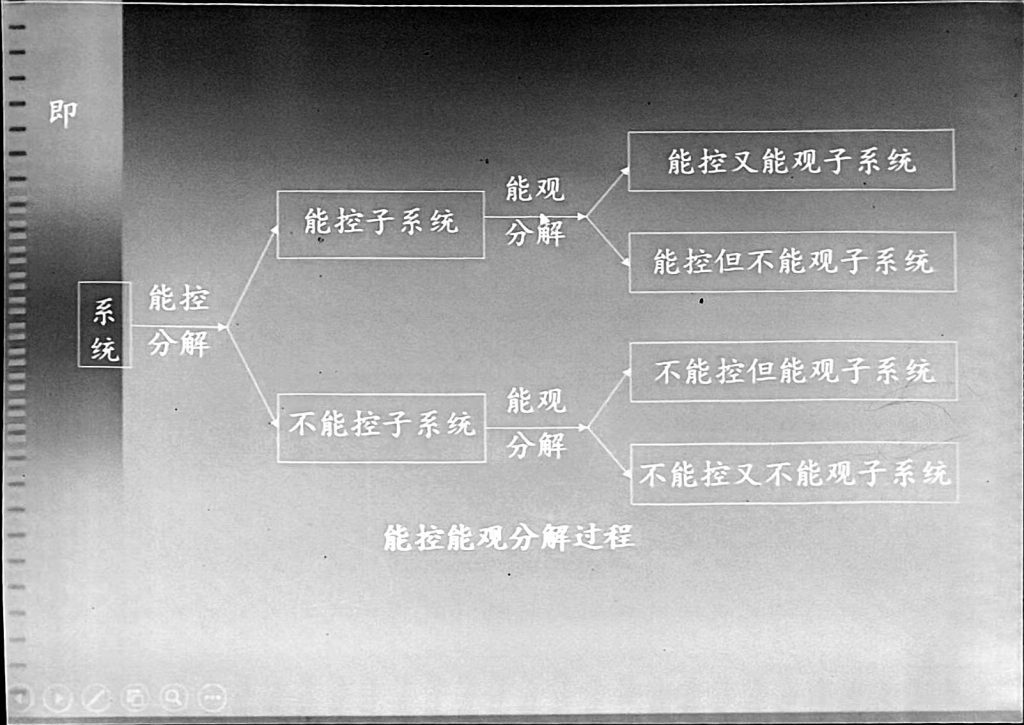
线性系统结构分解
能控分解,只有不完全能控才需要
状态不完全能控传递函数阵等于能控分解后子系统的传递函数阵,能观也是
秩小于维数 能控性?
分解 例题3.17?
p155 zuoye 3.7 3.8 3.9 3.10 3.11 1 3.12 2 3.13 1 3.14 1
P144 3.126有问题
行数少写能观,列数少写能控
P148 rank位置有错误
P149 <n 为 <nr

外部稳定能推内部稳定,反过来不一定
李雅普诺夫
p171
p187 4-9
p178 有问题
p195 例5-2 掌握画图
4.5 4.6 4.10
对完全能控的siso系统,不能采用输出型反馈来实现闭环系统极点的任意配置
