本文最后更新于502 天前,其中的信息可能已经过时,如有错误请发送邮件到525382782@qq.com
基本指令
ls 将当前位置文件列出
mkdir 建文件夹
pwd 打印当前目录
cd+目录名
cd ..返回上一级目录
cd ~返回主文件夹下
touch+文件名 创建空白文件
rm+文件名 删除文件
source指令
>>gedit command.sh
>>echo 我来了
>>echo 我走了
>>source command.sh
我来了
我走了
终端初始化命令(可以在打开终端后改变初始化)
在主文件加下
>>gedit ~/.bashrc
如何安装ros?(建议20.04)
https://www.bilibili.com/video/BV1aP41137k9/?p=5&spm_id_from=pageDriver
人家的博客教程(ros安装教程)https://www.leowangbo.tech/2023/02/12/ros%e7%8e%af%e5%a2%83%e6%90%ad%e5%bb%ba
安装ros其中的一个软件包
sudo apt install ros-noetic-rqt-robot-steering启动ros核心
roscore运行包
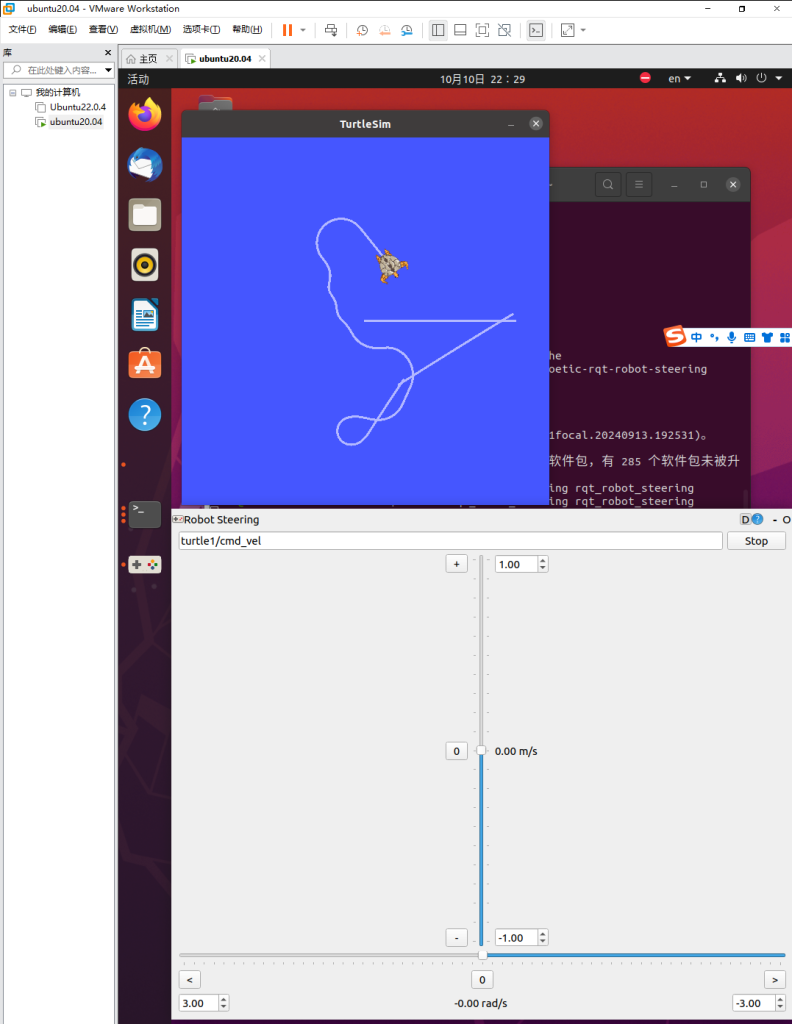
rosrun rqt_robot_steering rqt_robot_steering安装小乌龟
sudo apt install ros-noetic-turtlesim运行
rosrun turtlesim turtlesim_node成功画面
- index.ros.org
如何在github上找软件包?
scripts一般用来存放python脚本文件
